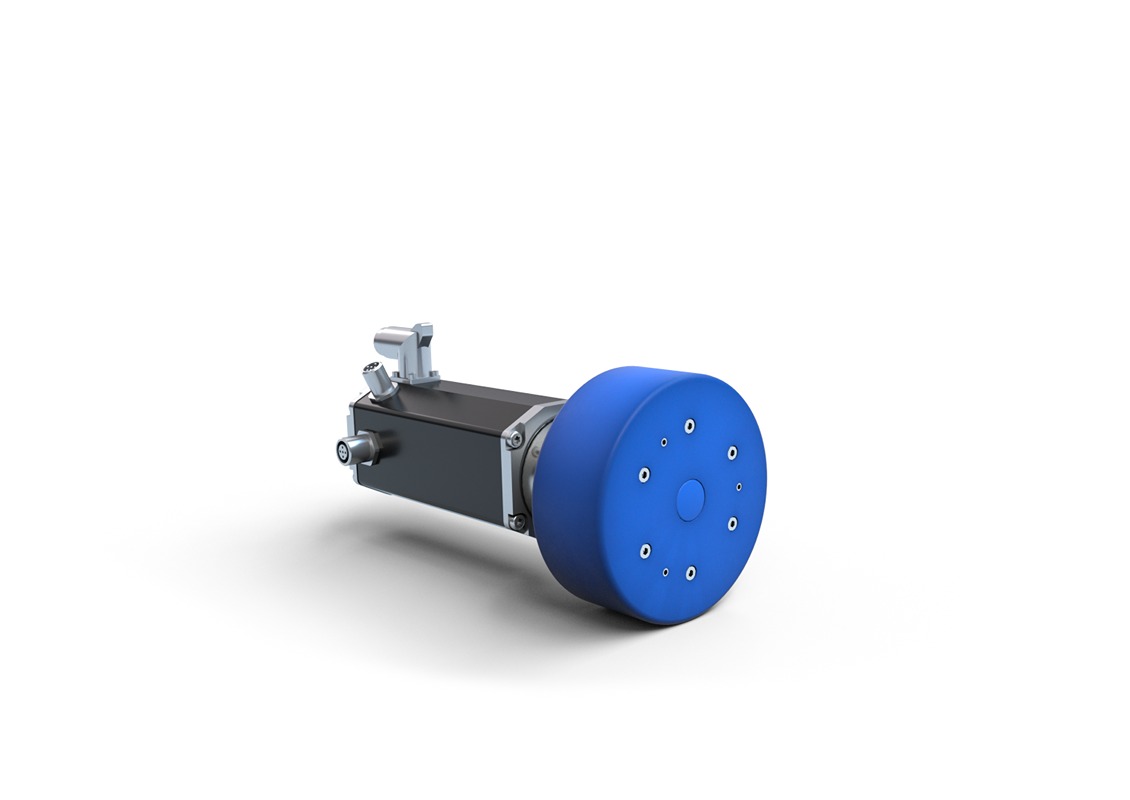
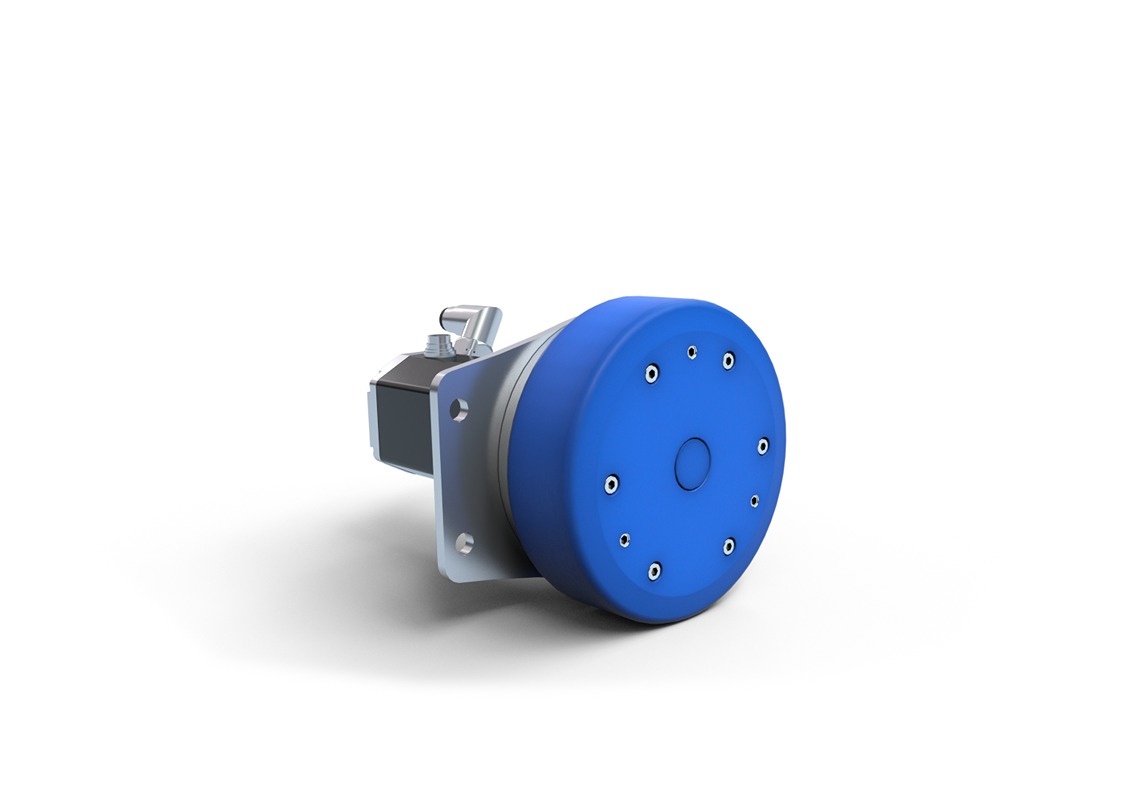
Antriebslösungen für AGVs/ AGCs/ AMRs
- Safety-Lösungen wie STO direkt im Motor
- Kompakte Motoren und Nabengetriebe für kleinsten Bauraum
- Interne und externe Regelelektronik möglich
- Innovative, energieeffiziente DC-Konzepte (IE 5) für Batterieanwendungen
- Hohe Lebensdauer und Zykluszahlen
- IIoT Ready mit nexofox- Systemlösungen

Wir bieten eine breite Range an Ausführungen von Motoren mit dazu passendem Nabengetriebe für Anwendungen in AGV´s an:
NG 250
Das kompakte Nabengetriebe für Traglasten bis zu 500 kg.
NG 500
Das kompakte Nabengetriebe für mittlere Anwendungen bis 1000 kg Gesamtgewicht.

NG 1000 WO
NG 1000 WO mit Offset ermöglicht schmale Bauformen und zugleich hohe Tragkraft. Transportlösungen mit max. 600mm breite für 2T Traglast sind realisierbar.
Ihre Ansprechpartner

Matthias Tidelski
Key Account Manager Industrial Automation
Dunkermotoren GmbH
Allmendstraße 11
79848 Bonndorf, Germany
- Phone: +49 (7703) 930 430
- Email: Matthias.Tidelski@ametek.com

Michael Basler
Key Account Manager Industrial Automation
Dunkermotoren GmbH
Allmendstraße 11
79848 Bonndorf, Germany
- Phone: +49 (7703) 930 294
- Email: Michael.Basler@ametek.com
Featured Products


Downloads


FAQ: BLDC-Motoren in AGVs und AMRs
-
Welche Herausforderungen lassen sich aus den Erfahrungen mit den Antrieben von AGVs und AMRs im Einsatz ableiten?Im Einsatz zeigt sich, dass unterschiedliche Fahrzeuggrößen unterschiedliche Batteriekonzepte erfordern: Während kleinere AGVs/AMRs häufig mit 12/24 V arbeiten, nutzen mittlere und größere Fahrzeuge meist 48 V-Systeme – mit Ladepeaks von bis zu rund 58 V.
Das verlangt spannungsflexible und robuste Antriebe. Gleichzeitig steigt die Funktionsdichte der Fahrzeuge, da neben Fahr- und Hubantrieben zunehmend komplette Regal- oder Mehrachssysteme über denselben Batteriepack betrieben werden. Auch die Sicherheitsanforderungen wachsen: Ein einfaches STO genügt oft nicht mehr, stattdessen werden redundante Geberlösungen für einen sicheren Stillstand benötigt.
Zusätzlich steigen die Lebensdauererwartungen auf 20.000–30.000 Betriebsstunden, was sowohl die Antriebe als auch die Getriebe betrifft. Servicefreundliche Anschlusstechnik und vollständige Zertifizierungen spielen ebenfalls eine größere Rolle. Dunkermotoren begegnet diesen Anforderungen mit den spannungstoleranten dMove- und dPro-Antrieben, Hybridverkabelung sowie robusten Lösungen wie dem IP65-Radnabengetriebe NG1000 für Outdoor-AMRs. -
Worauf müssen die Konstrukteur:innen gegebenenfalls mehr Augenmerk legen?Bei der Auslegung von AGV-/AMR-Antrieben ist der verfügbare Bauraum entscheidend, da er die Wahl zwischen externen Reglern (BGE + BG dCore) und integrierten Lösungen (dMove/dPro) bestimmt. Extern ermöglicht kürzere Motoren, einfaches Abgreifen von Encodersignalen zur Sicherheits-SPS und sehr kleine Baugrößen, integriert reduziert Verkabelung, EMV-Themen und Einbauplatz. Wichtig ist zudem, dass die Antriebe die für typische Beschleunigungsphasen nötige Spitzenleistung über mehrere Sekunden bereitstellen. Für ein sauberes Fahrverhalten spielt das Massenträgheitsverhältnis eine zentrale Rolle, da ein zu kleines Massenträgheitsmoment des Antriebs im Verhältnis zur Fahrzeugmasse zu Regelabweichungen führen kann. Hubantriebe sind meist nur kurzzeitig aktiv und können kleiner ausgelegt werden; oft genügt ein dMove-Motor mit einfacher Endlagenpositionierung. Wird in allen Achsen STO gefordert, ist die dPro-Baureihe zu wählen. Bei engen Bauräumen helfen Antriebe mit einseitigem Steckerabgang. Für präzises Andocken ist eine gute Regelgüte bei niedriger Drehzahl wesentlich; dPro ist vektorregelnd, dMove für moderate Regelanforderungen ausgelegt.
-
Gibt es aus dieser Sicht speziell zu beachtende Unterschiede zwischen einem AGV und einem AMR?Vom Antriebskonzept gibt es keine Unterschiede. Die Drehzahlregelung der Antriebsmotoren und somit Fahrbewegung steuert die übergeordneter Sicherheitssteuerung.
-
Fordert der Batteriebetrieb sehr energieeffiziente Antriebe oder lassen sich die Fahrzeuge häufig genug laden?Der Batteriebetrieb macht energieeffiziente Fahrantriebe zwingend erforderlich, denn jede Ladepause bedeutet direkten Stillstand des Fahrzeugs und damit Produktivitätsverlust. Deshalb kommen in AGVs und AMRs typischerweise Motoren der Baureihen BG75 und BG95 mit integrierter dPro-Elektronik zum Einsatz, die Wirkungsgrade von 87 bis 91 % erreichen – ein Niveau, das dem IE5-Effizienzlevel von Drehstrommotoren entspricht. Neben dem Motorwirkungsgrad spielt auch die Wahl des Getriebes eine wesentliche Rolle. Bevorzugt werden Planetengetriebe, da sie hohe Wirkungsgrade bieten und mechanisch robust sind. Je nach Belastung kommen entweder Flanschgetriebe für hohe Radiallasten oder Varianten mit Ausgangswelle für geringere mechanische Anforderungen zum Einsatz. Zusammen ermöglichen diese Kombinationen lange Fahrzeiten pro Ladung und reduzieren die Anzahl notwendiger Ladezyklen im Betrieb.
-
Was bedeutet das für die Wahl von E-Motor und Getriebe?Für die Auswahl von E-Motor und Getriebe ist vor allem der Arbeitspunkt bei der Konstantfahrt ausschlaggebend, da sowohl Motor als auch Getriebe in diesem Bereich einen möglichst hohen Wirkungsgrad erreichen sollten. Das ist jedoch nicht immer einfach umzusetzen, da sich Lasten und Geschwindigkeiten im realen Betrieb häufig ändern. Wenn möglich, sollten 48-Volt-Batterien und darauf ausgelegte Antriebe eingesetzt werden, da diese im Vergleich zu 12- oder 24-Volt-Varianten typischerweise einen um etwa 2 bis 5 % höheren Wirkungsgrad erzielen und damit die Betriebseffizienz spürbar verbessern.
-
Welche Rolle spielt bei den AGV- und AMR-Antrieben die vorausschauende Wartung (Predictive Maintenance)? In welchem Maße lohnt es sich, Antriebsdaten zu erfassen und kann ich damit den Betrieb weiter optimieren?Vorausschauende Wartung spielt bei AGV- und AMR-Antrieben derzeit noch eine untergeordnete Rolle; in vielen Anwendungen werden die Einheiten erst am Ende ihrer Lebensdauer ausgetauscht. Mit dPro-Motoren und integrierter Ethernetschnittstelle, etwa über Profinet, besteht jedoch die Möglichkeit, Betriebsdaten mithilfe des IIoT-Bausteins Nexolink an kundenseitige Cloud-Systeme zu übertragen und auszuwerten. Erste Pilotprojekte hierfür wurden bereits umgesetzt.

In der Praxis ist jedoch zu berücksichtigen, dass am Antrieb häufig zusätzliche mechanische Komponenten wie Achsen oder Hubzylinder montiert sind, die ebenso verschleißen können. Steigt beispielsweise Motorstrom oder Temperatur, lässt sich nicht sofort eindeutig zuordnen, welches Bauteil ursächlich ist. Deshalb werden Grenzwerte und Kriterien für potenzielle Ausfälle immer gemeinsam mit dem Kunden definiert, um eine passende und anwendungsspezifische Wartungsstrategie zu ermöglichen.