Gear Motor Solutions for AGVs/ AGCs/ AMRs
- Integrated Safety (STO): Ensures safe operation with features like Safe Torque Off directly in the motor.
- Compact Design: Minimize footprint with our space-saving motors and hub gearboxes.
- Flexible Control Options: Choose between internal or external control electronics to suit your application needs.
- Battery-Powered Efficiency: Innovative DC concepts (IE5) optimize energy consumption for extended runtime.
- Durable Performance: Expect long life and high cycle counts for reliable operation.

We offer a wide range of gear motor designs with matching hub gears for AGV applications:
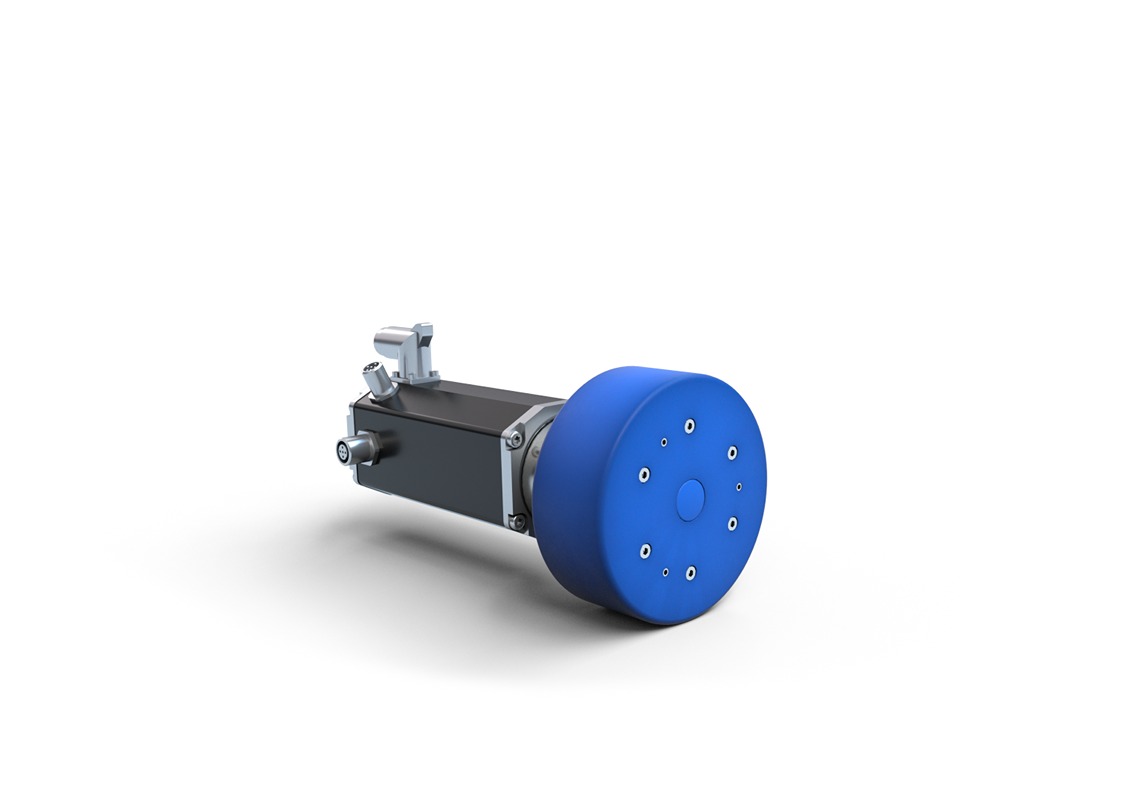
NG 250
The compact hub gearbox for lighter applications with load capacity of up to 500kg.
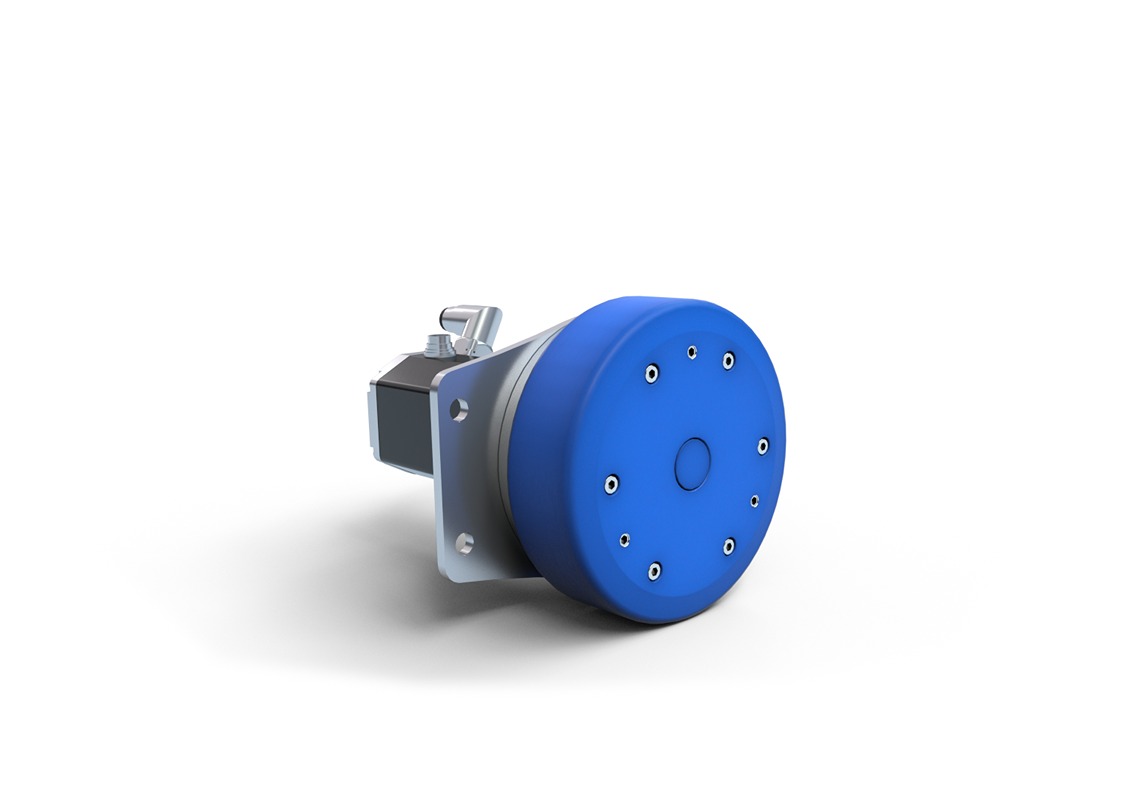
NG 500
The compact hub gearbox for medium applications with load capacity of up to 1000kg.
NG 1000 WO
The NG 1000 WO with offset design enables remarkably narrow yet powerful transport solutions. With this innovative system, you can achieve a 2-ton load capacity in a compact 600 mm width.

Your Contact Persons:

Matthias Tidelski
Key Account Manager Industrial Automation
Dunkermotoren GmbH
Allmendstraße 11
79848 Bonndorf, Germany
- Phone: +49 (7703) 930 430
- Email: Matthias.Tidelski@ametek.com

Michael Basler
Key Account Manager Industrial Automation
Dunkermotoren GmbH
Allmendstraße 11
79848 Bonndorf, Germany
- Phone: +49 (7703) 930 294
- Email: Michael.Basler@ametek.com
Featured Products

Downloads


FAQ: BLDC Motors in AGVs and AMRs
-
What challenges can be derived from the real‑world operation of AGV and AMR drive systems?In practical use it becomes clear that different vehicle sizes require different battery architectures. Smaller AGVs and AMRs typically operate on 12 or 24 volts, while medium and large autonomous vehicles usually rely on 48‑volt battery systems with charging peaks of up to around 58 volts. This requires voltage‑flexible and robust BLDC motor drives.
At the same time the functional density of the vehicles increases. In addition to traction and lift drives, complete shelf or multiaxis systems are often supplied from the same battery pack. Safety requirements are rising as well. A simple STO is often no longer sufficient and many applications require redundant encoder systems to achieve a safe stop.
Life expectancy is also increasing to 20,000 to 30,000 operating hours, which applies to both the BLDC motors and the gearboxes. Service‑friendly connection technology and complete certification packages are becoming more important. Dunkermotoren addresses these requirements with the voltage‑tolerant dMove and dPro drive families, hybrid cabling concepts and robust solutions such as the IP65 NG1000 wheel hub gearbox for outdoor AMRs. -
What should design engineers pay particular attention to when it comes to AGVs?When designing AGV or AMR drive units the available installation space is one of the most critical factors, because it determines whether external controllers such as BGE with BG dCore or integrated motor controllers such as dMove or dPro are used. External controllers enable shorter motors, easy access to encoder signals for the safety PLC and very compact form factors. Integrated drives reduce cabling, EMC challenges and required mounting space.
It is essential that the drives supply the necessary peak power for several seconds during acceleration phases. The mass inertia ratio also plays a decisive role in smooth driving behavior. If the inertia of the drive is too low relative to the vehicle mass, control deviations can occur.
Lift drives are only active for short periods and can therefore be dimensioned smaller. A dMove motor with simple end‑position control often suffices. If STO is required on all axes, the dPro series must be used. In tight installation spaces, drives with a single‑sided connector layout offer benefits. For precise docking operations excellent low‑speed control performance is crucial. dPro provides full vector control, while dMove is designed for moderate control requirements. -
Are there specific differences between AGVs and AMRs from a drive‑technology perspective?From the motor and drive concept perspective there are no fundamental differences. The speed control of the traction motors and therefore the vehicle motion is always managed by the higher‑level safety control system.
-
Does battery operation require highly energy‑efficient drives or can the vehicles be charged frequently enough?Battery operation makes highly energy‑efficient traction drives absolutely essential, because every charging pause results in immediate downtime and productivity loss. Therefore AGVs and AMRs typically use BLDC motors of the BG75 and BG95 series with integrated dPro electronics. These achieve efficiencies between 87 and 91 percent, comparable to IE5 efficiency levels of synchronous motors.
Besides motor efficiency, the choice of gearbox is equally important. Planetary gearboxes are preferred because they offer high efficiency and mechanical robustness. Depending on the load profile, flange gearboxes for high radial loads or versions with output shaft for lower mechanical forces are used. These combinations enable long driving times per charge and reduce the number of charging cycles required in operation. -
What does this imply for selecting the electric motor and gearbox?The most important factor for selecting a motor and gearbox is the operating point during constant driving because both components should achieve the highest possible efficiency in this region. This is not always easy, since load and speed vary in real applications.
Whenever possible, 48‑volt batteries and corresponding 48‑V BLDC drive systems should be used. Compared to 12‑ or 24‑volt systems they typically achieve two to five percent higher efficiency, which significantly improves overall operational efficiency. -
What role does predictive maintenance play in AGV and AMR drives? How valuable is the acquisition of drive data for further optimization?Predictive maintenance currently plays a minor role in AGV and AMR drives. In many applications the units are simply replaced at the end of their service life. However, with dPro motors and integrated Ethernet interfaces such as Profinet it is possible to transmit operating data to customer cloud systems via the Nexolink IIoT module and evaluate them. Initial pilot projects are already running.

In practice it must be considered that additional mechanical components such as axles or lifting cylinders are mounted to the drive and these can also wear out. If motor current or temperature increases it is not always clear which component is responsible. Therefore threshold values and failure criteria are always defined together with the customer to enable an application‑specific and effective maintenance strategy. -
What drive solution is typically used for AGVs and AMRs?Our recommended drive platform for Automated Guided Vehicles and Autonomous Mobile Robots combines the BG75 and BG95 BLDC motors with integrated dPro motor electronics and high‑efficiency planetary or wheel‑hub gearboxes.
This modular drive system provides high torque density, precise traction control, advanced safety functions including STO, and excellent energy efficiency for 48‑volt AGV and AMR applications. The combination of compact BLDC motors, intelligent motion control, and robust gearbox options ensures long driving ranges, reliable continuous operation, and minimal maintenance requirements. -
What is the key message behind modern AGV and AMR drive technology?The operation of AGVs and AMRs clearly shows that the requirements for drive systems are continually increasing. Safety standards are rising, expected service life is becoming longer, and more functional integration is required within very limited installation space. At the same time, energy efficiency, precise low‑speed control, and compatibility with complex multiaxis automation are becoming essential for reliable and productive autonomous fleets.
For system engineers this means that installation space, safety architecture, torque demands, and overall motion performance must be considered early in the vehicle design process. While AGVs and AMRs do not differ significantly in terms of their drive architecture, the role of predictive maintenance and continuous drive data monitoring is steadily growing. These capabilities help maximize uptime, reduce operational costs, and ensure long‑term system reliability in demanding industrial environments.